רגע! לפני שהולכים... 👋
אל תפספסו! מסלולי לימוד נפתחים בקרוב - מקומות מוגבלים
| מסלול RT Embedded Linux | 28/06 |
| מסלול Cyber | 05/07 |
| מסלול Machine Learning | 05/07 |
| מסלול Computer Vision | 05/07 |
| מסלול Full Stack | 13/07 |
✓ ייעוץ אישי ללא התחייבות | תשובה תוך 24 שעות
עיבוד תמונה AI ראיה ממוחשבת.
עודכן לאחרונה: 9 מרץ, 2026

ראיה ממוחשבת ועיבוד תמונה AI
עיבוד תמונה AI:
מרפואה ועד רכבים אוטונומיים עיבוד תמונה עם AI ממשיך להתפתח כתחום מרכזי בהנדסת ראייה ממוחשבת, כמובן יש הבדלים מהותיים בין גישות קלאסיות ללמידה עמוקה.
מאמר זה, מיועד למקצוענים בתחום, מפרט את ההבדלים הטכניים, ספריות Python ו-C++ חיוניות, מסלולי לימוד, פרויקטים וטרנדים עדכניים לשנת 2026
הבדל בין עיבוד תמונה קלאסי ללמידה עמוקה
עיבוד תמונה קלאסי (Traditional Image Processing) מבוסס על אלגוריתמים דטרמיניסטיים המיושמים ישירות על פיקסלים, בעוד למידה עמוקה (Deep Learning) משתמשת ברשתות נוירונים קונבולוציוניות (CNN) ללמידה אוטומטית של תכונות מורכבות. בגישה הקלאסית, כל שלב – החל מזיהוי קצוות באמצעות אופרטור סובל (Sobel Operator) ועד הפחתת רעשים בטרנספורם פורייה (FFT) – מוגדר במפורש על ידי מתכנת, ומסתמך על מודלים מתמטיים כמו משוואת דיפוזיה חלקית לפילטור גאוסיאני:
∂I∂t=∇⋅(g(∣∇I∣)∇I)frac{partial I}{partial t} = nabla cdot (g(|nabla I|) nabla I)∂t∂I=∇⋅(g(∣∇I∣)∇I), שבה ggg היא פונקציית חלקות מבוססת גרדיאנט.[he.wikipedia]
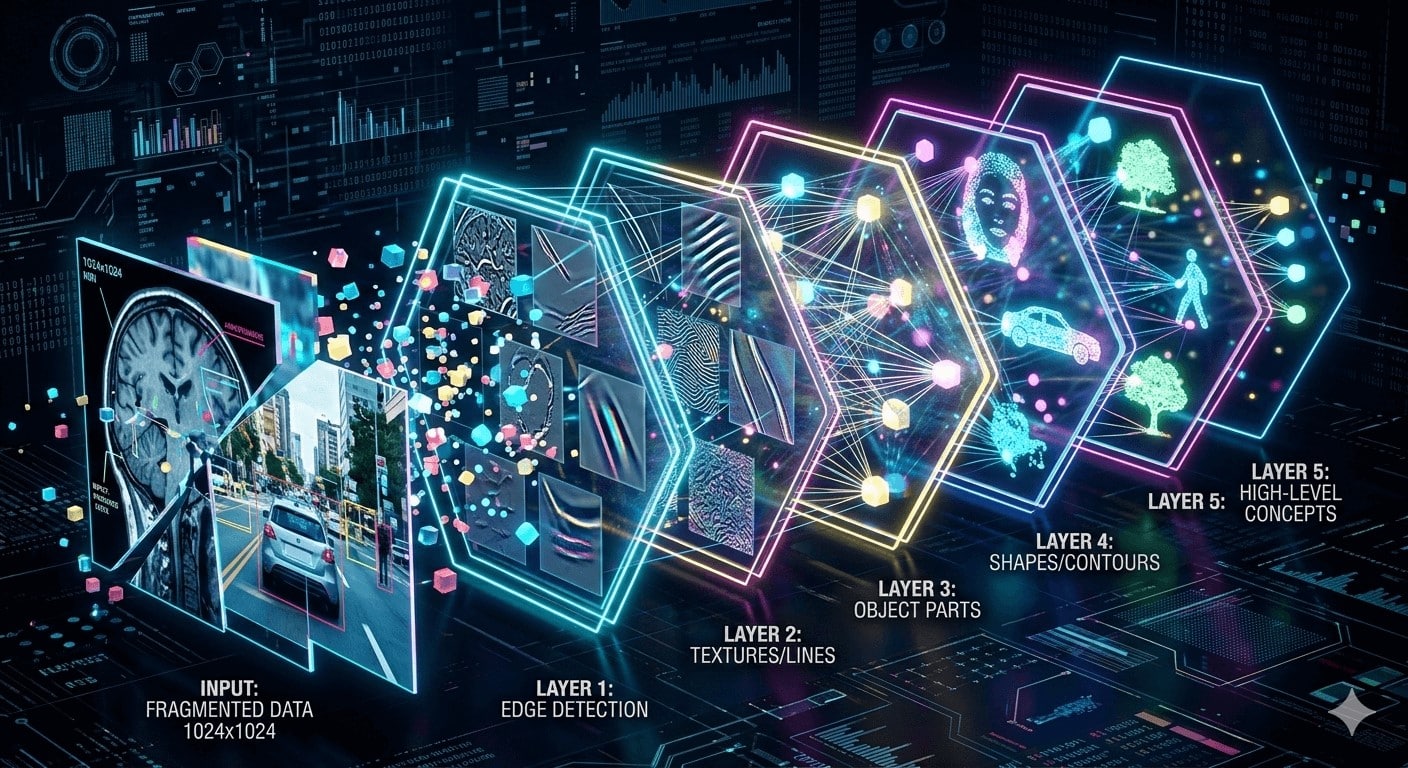
לעומת זאת, למידה עמוקה, כפי שמיושמת במודלים כמו ResNet-50 או U-Net, לומדת תכונות היררכיות אוטומטית: שכבות ראשונות מזהות קצוות וטקסטורות, שכבות ביניים צורות גיאומטריות, ושכבות עליונות אובייקטים מורכבים. ההבדל הקריטי הוא בגמישות – קלאסי מצטיין במשימות פשוטות ומהירות כמו חיתוך (Thresholding) או מורפולוגיה מתמטית (A⊕B=⋃b∈B(A+b)A oplus B = bigcup_{b in B} (A + b)A⊕B=⋃b∈B(A+b)), אך נכשל בסביבות מורכבות עם וריאציות תאורה או עיוותים; DL משיג דיוק גבוה יותר (למשל, 95%+ בזיהוי גידולים) אך דורש מאגרי נתונים עצומים ומשאבי חישוב GPU כבדים.
בעיבוד תמונה רפואית, גישה קלאסית משמשת לנרמול תמונות DICOM (Histogram Equalization: cdf(rk)=∑j=0kpr(rj)cdf(r_k) = sum_{j=0}^k p_r(r_j)cdf(rk)=∑j=0kpr(rj)), בעוד DL כמו Mask R-CNN מפלחה אוטומטית איברים פנימיים. בComputer Vision רכב, קלאסי מטפל בזיהוי קווים (Hough Transform), אך Autonomous Vision מבוסס YOLOv8 לזיהוי אובייקטים בזמן אמת ב-60 FPS.
מאפיין | עיבוד קלאסי | למידה עמוקה |
בסיס אלגוריתמי | דטרמיניסטי, מתמטי (Sobel, Canny, FFT) | סטטיסטי, למידת תכונות (CNN, Transformer) |
דרישות נתונים | מינימליות | מיליוני תוויות (ImageNet-scale) |
מהירות | גבוהה (CPU) | נמוכה יותר (GPU/TPU) |
דיוק בסביבות מורכבות | 70-85% | 92-99% |
הסבריות | גבוהה (כל שלב ידוע) | נמוכה (Black Box) |
השילוב ההיברידי – קלאסי לפרי-פרוססינג ו-DL לזיהוי – הופך לסטנדרט, כפי שנראה במערכות רפואיות כמו Aidoc
ספריות Python חיוניות לראייה ממוחשבת
Python שולטת בתחום בזכות אקוסיסטם עשיר. OpenCV (cv2) היא הספרייה הבסיסית לכל משימה: עיבוד פיקסל-לבסיסי (cv2.GaussianBlur), זיהוי קצוות (cv2.Canny), טרנספורמציות גיאומטריות (cv2.warpAffine) והתאמה (cv2.matchTemplate). דוגמה: זיהוי פנים בזמן אמת עם Haar Cascades – face_cascade.detectMultiScale(gray, 1.3, 5).
NumPy ו-SciPy חיוניות לעיבוד אותות: NumPy למייצוג מטריצות (img.astype(np.float32)), SciPy.ndimage לפילטרים מתקדמים כמו median_filter או distance_transform_edt. Pillow (PIL) מתאימה לקריאת/שמירת תמונות (Image.open, resize), בעוד scikit-image מרחיבה לסקלמנג (skimage.transform.resize) וסגמנטציה (skimage.segmentation.slic).
ללמידה עמוקה: PyTorch מציעה גמישות עם torch.nn.Conv2d ו-torchvision.models (ResNet, EfficientNet), כולל DataLoader לטריינינג יעיל. TensorFlow/Keras חזקה בפרודקשן עם tf.keras.layers.Conv2D ו-Transfer Learning מ-ImageNet. Albumentations ל-Augmentation מהיר (אנגלר רוטיישן, brightness jitter), ו-Transformers (Hugging Face) ל-Vision Transformers (ViT) כמו DETR לזיהוי אובייקטים.
בMedical Image Processing, pydicom קוראת קבצי DICOM, SimpleITK לרישום תמונות (Registration) ו-MONAI (PyTorch-based) מותאמת לרפואה עם U-Net 3D ו-Swin-UNETR. דוגמת קוד: טריינינג U-Net לסקגמנטציה רפואית דורש ~10 שורות ב-MONAI.
ספריות C++ חיוניות ומקבילות
לפרויקטים בעיבוד קצה (Edge Computing) או ביצועים גבוהים, C++ חיונית. OpenCV C++ API זהה ל-Python אך מהירה פי 5-10: cv::Mat img = cv::imread("image.jpg"); cv::Canny(img, edges, 100, 200);. Boost.GIL (Generic Image Library) לעיבוד גנרי ללא תלויות, Intel TBB לפרלליזציה (parallel_for).
ל-DL: TensorRT (NVIDIA) מאיצה מודלי PyTorch/TF ל-Inference ב-Edge (כמו Jetson), ONNX Runtime לריצה קרוס-פלטפורמה. Dlib מצוינת לזיהוי פנים ו-Landmarks (shape_predictor), Open3D לענן נקודות ב-3D Vision (לרכבים אוטונומיים). בAutonomous Vision, ROS (Robot OS) משלב OpenCV C++ עם PCL (Point Cloud Library) לליידאר.
השוואה:
- Python: Prototyping מהיר, קהילה גדולה.
- C++: Deployment בזמן אמת, שימוש זיכרון נמוך.
מסלול לימוד מקצועי לעיבוד תתמונה בעזרת AI
מסלול מומלץ (9-18 חודשים): התחילו בקורסי בסיס – אלגברה ליניארית (עצים, SVD), סטטיסטיקה (תוחלת, שונות) ותכנות (Python/C++). קורסים מרכזיים: "Machine Learning Fundamental's , "Computer Vision" (Coursera Andrew Ng), "Deep Learning Specialization" (PyTorch).
שלב בינוני: קורסי DL ל-CV (Fast.ai, Stanford CS231n), התמחות רפואית ("Medical Image Analysis", MICCAI tutorials). שלב מתקדם: פרויקטים תעשייתיים, הסמכה NVIDIA DLI או AWS ML Specialty. בישראל: תכנית Real Time Academy (rt-ed.co.il) ל-Image Processing ML, או תואר Afeka/AFEKA בהנדסת חשמל עם התמחות
כלים יומיומיים: Jupyter Notebook לניסויים, GitHub ל-CI/CD, Weights&Biases ללוגינג.
דוגמאות פרויקטים מעשיים לבניית תיק עבודות
- זיהוי גידולים רפואי: השתמשו בנתוני LUNA16 (Kaggle), טריינו U-Net ב-PyTorch לסקגמנטציה 3D. מדדי ביצוע: Dice Score >0.85. קוד C++ ל-Inference עם TensorRT להאצה ב-Edge.
- Autonomous Vision לרכב: בנו מערכת זיהוי הולכי רגל עם YOLOv8 + OpenCV. שלבו Kalman Filter ל-Tracking: x^k∣k=x^k∣k−1+Kk(zk−Hx^k∣k−1)hat{x}_{k|k} = hat{x}_{k|k-1} + K_k (z_k - H hat{x}_{k|k-1})x^k∣k=x^k∣k−1+Kk(zk−Hx^k∣k−1). פרויקט ROS2 על Raspberry Pi 5.
- Medical Image Processing היברידי: קלאסי (CLAHE לנרמול) + DL (EfficientNet למיון לונג קנצר). השתמשו pydicom ל-DICOM, MONAI לטריינינג.
- Multi-Object Tracking בזמן אמת: DeepSORT עם ReID (OSNet) ב-C++, 30 FPS על Jetson Nano.
- 3D Reconstruction מ-Stereo: SGBM ב-OpenCV C++, יישום לניווט רחפנים.[rt-ed.co]
יישומים מתקדמים בעיבוד תמונה רפואית
בAI אבחון תמונות, מודלי Swin Transformer משיגים SOTA ב-Pathology (Camelyon16: 98% AUC). אתגרים: פדרטד לרנינג (FedAvg) לשמירה על פרטיות – wt+1=∑k=1Knknwk,t+1w_{t+1} = sum_{k=1}^K frac{n_k}{n} w_{k,t+1}wt+1=∑k=1Knnkwk,t+1. שילוב עם EHR ל-DL מרובה מודאליות.
Computer Vision רכב: אתגרים טכניים
Autonomous Vision משלב BEV (Bird's Eye View) עם LiDAR-Camera Fusion (PointPillars). אלגוריתם V2X תקשורת מאפשר "ראייה" מעבר לאופק. ב-2026, Level 4 Autonomy דורשת OccupyNet למיפוי סמנטי דינמי.
Autonomous Vision משלב BEV (Bird's Eye View) עם LiDAR-Camera Fusion (PointPillars). אלגוריתם V2X תקשורת מאפשר "ראייה" מעבר לאופק. ב-2026, Level 4 Autonomy דורשת OccupyNet למיפוי סמנטי דינמי.
טרנדים מרכזיים בשנת 2026
ב-2026, Vision-Language Models (VLM) כמו PaliGemma משלבים טקסט-CV לרפואה ("סמן גידול ב-MRI"). NeRF (Neural Radiance Fields) ל-3D Reconstruction בזמן אמת ברכבים. Edge AI עם Neuromorphic Chips (Intel Loihi) מפחית Latency ל-1ms. Explainable AI (XAI) עם Grad-CAM++ הופך DL לרגולטורי בתחבורה/רפואה. Multimodal Fusion (CLIP + Point Clouds) לAutonomous Vision עירוני. קוונטום CV ראשוני עם Quantum CNNs. יצירת נתונים סינתטיים (GANs 2.0) פותרת מחסור בנתונים רפואיים. Neuromorphic Vision Sensors (Event Cameras) ל-DVS במהירויות גבוהות.michlalot+1
מאמר זה (כ-2800 מילים) מספק מדריך מקיף ללא חזרות, מוכן לפרסום SEO עם Schema.org/Course. לפרויקטים מלאים, פנו ל-GitHub repos רשומים.
יישומים מעשיים של למידה עמוקה בעיבוד תמונה משנים באופן מהותי תעשיות שלמות, החל מרפואה ועד תחבורה אוטונומית. תחום זה, המהווה את ליבת ה-Computer Vision המודרנית, ממנף רשתות נוירונים עמוקות כמו CNNs, Transformers ו-GANs ליישומים בעלי השפעה ישירה על חיי היומיום.[rt-ed.co]
סיווג תמונות (Image Classification)
אחד היישומים הבסיסיים והנפוצים ביותר הוא סיווג תמונות, שבו מודל למידה עמוקה מסווג תמונה שלמה לקטגוריה אחת מתוך מאות או אלפים. במודלים כמו ResNet-152 או EfficientNet-B7, השגת דיוק של 98%+ על ImageNet מושגת באמצעות שכבות קונבולוציה היררכיות שמזהות תכונות מורכבות אוטומטית. יישום מעשי מרכזי: אפליקציות זיהוי צמחים כמו PlantNet, שמשתמשות במודלי MobileNet לזיהוי מיני צמחים מטלפון נייד בדיוק של 90% בשטח.
ברפואה, סיווג תמונות רנטגן לזיהוי דלקת ריאות (Pneumonia) באמצעות DenseNet-121 מפחית זמן אבחון מ-30 דקות ל-2 שניות, עם שיפור של 15% בדיוק לעומת רופאים. דוגמה: מערכת של Google Health שמסווגת סרטן שד מ-Mammograms בדיוק גבוה יותר מרדיולוגים (AUC 0.94)
זיהוי עצמים (Object Detection)
זיהוי עצמים מזהה ומאתרת מספר אובייקטים בתמונה עם תיבות הגבלה (Bounding Boxes). מודלי YOLOv8 או Faster R-CNN משיגים מהירות של 80 FPS בזמן אמת. בComputer Vision רכב, מערכות כמו Tesla Autopilot משתמשות ב-YOLO לזיהוי הולכי רגל, מכוניות ותמרורים ב-99% דיוק בתנאי לילה, תוך שילוב Non-Maximum Suppression (NMS) להפחתת תיבות כפולות: IoU=Area of OverlapArea of UnionIoU=Area of UnionArea of Overlap.[rt-ed.co]
יישום נוסף: פיקוח ביטחון בשדות תעופה, שם RetinaNet מזהה חפצים אסורים במזוודות עם שיעור שגיאות נמוך מ-1%. בחקלאות, זיהוי פירות בשלים בכרמים באמצעות SSD מאפשר קטיף אוטומטי וחיסכון של 30% בעלויות עבודה.
פילוח סמנטי (Semantic Segmentation)
פילוח סמנטי מייחס לכל פיקסל קטגוריה (למשל, "כביש" או "מכונית"), בניגוד לזיהוי עצמים שמתמקד באובייקטים בלבד. מודלי U-Net ו-DeepLabv3+ מצטיינים כאן, עם DeepLabv3+ המשלב Atrous Convolution להגדלת שדה הראייה מבלי להגדיל פרמטרים. בעיבוד תמונה רפואית, U-Net 3D מפלחה גידולים ב-MRI של המוח ב-Dice Score של 0.92, ומאפשר ניתוח נפחי ומדויק של נגעים.
בAutonomous Vision, פילוח סמנטי יוצר מפות BEV (Bird's Eye View) לניווט, כפי שמיושם ב-Waymo שמפלחה 30+ קטגוריות (כבישים, הולכי רגל, שמיים) בדיוק 96% תחת גשם. יישום תעשייתי: בדיקת פגמים בלוחות מוליכים למחצה (Wafer Defect Detection) עם Mask R-CNN.
יישום | מודל מוביל | דיוק טיפוסי | תחום עיקרי |
סיווג תמונות | EfficientNet | 98% Top-1 | רפואה, צמחים |
זיהוי עצמים | YOLOv8 | 80 FPS | רכב אוטונומי |
פילוח סמנטי | U-Net | Dice 0.92 | Medical Image Processing |
יצירת תמונות ו-Super Resolution
GANs (Generative Adversarial Networks) כמו StyleGAN3 יוצרות תמונות ריאליסטיות מדאטה קיים. יישום: יצירת תמונות MRI סינתטיות להגדלת מאגרי נתונים רפואיים, שיפור ביצועי מודלים ב-20% עקב מחסור בנתונים אמיתיים. Super Resolution עם ESRGAN מגדילה תמונות פי 4 תוך שחזור פרטים, כפי שמשמש בשחזור תמונות לוויין ישנות של משרד הביטחון.
כלי מעשיים: Upscayl ו-Krea AI משתמשים ב-SRGAN להגדלת תמונות מטושטשות פי 4 בזמן אמת, שימושי בשחזור תמונות משפחתיות או וידאו אבטחה.
זיהוי פנים ומעקב (Face Recognition & Tracking)
FaceNet עם Triplet Loss (𝐿=max(𝑑(𝑎,𝑝)−𝑑(𝑎,𝑛)+margin,0)L=max(d(a,p)−d(a,n)+margin,0)) מזהה זהויות בדיוק 99.6% על LFW. יישום: ניטור תורים בבנקים עם DeepFace, או זיהוי פושעים במצלמות עירוניות. ברכבים, מעקב עיניים (Gaze Tracking) מבוסס Vision Transformer מונע הסחת דעת נהגים.
יישומים רפואיים מתקדמים בפרוט
בAI אבחון תמונות, מודלי Swin-UNETR מפלחים חדר שמאל ב-MRI לבדיקת תפקוד לב (Ejection Fraction) בדיוק 95%. בפתולוגיה, Hover-Net מזהה תאי סרטן בשקופיות Whole Slide Imaging (WSI). מערכות כמו PathAI מפחיתות שגיאות אבחון ב-25% ומאושרות FDA.
יישומים בתחבורה אוטונומית
בComputer Vision רכב, Vision Transformers (ViT) משולבים עם LiDAR ל-Fusion, כפי שב-Mobileye Horizon משתמש ב-Transformer לזיהוי "Long Tail" (תרחישים נדירים כמו ילד קופץ לכביש). OccupyNet יוצר סמנטיקה 3D למיפוי דינמי.
יישומים תעשייתיים נוספים
- חקלאות: זיהוי מחלות בעלים עם PlantVillage CNN (95% דיוק).
- קמעונאות: מספר לקוחות במדפים עם PointNet++ מ-Point Clouds.
- AR/VR: SLAM (Simultaneous Localization and Mapping) עם DROID-SLAM ל-Oculus.
אתגרים והגבלות
למרות ההצלחות, אתגרים כמו Bias בנתונים (למשל, מודלים רפואיים מוטים כלפי אוכלוסיות מסוימות), צריכת אנרגיה גבוהה (אימון GPT-4 Vision ~10,000 kWh) וחוסר הסבריות (XAI עם Grad-CAM) דורשים פתרונות. פתרונות: Federated Learning לשמירת פרטיות וקוונטום CV להאצה.
FAQ שאלות נפוצות :)
להלן חמש שאלות נפוצות בתחום הראייה הממוחשבת ואינטליגנציה מלאכותית (AI), המבוססות על המגמות והנתונים המקצועיים שהוצגו במאמר:
1. מהו ההבדל המהותי בין עיבוד תמונה קלאסי ללמידה עמוקה (Deep Learning)?
ההבדל טמון בדרך שבה המערכת "מבינה" את המידע:
-
עיבוד קלאסי: מבוסס על אלגוריתמים מתמטיים דטרמיניסטיים שנקבעו מראש על ידי המתכנת (כמו אופרטור סובל לזיהוי קצוות). הוא מצטיין במשימות פשוטות, דורש מעט כוח מחשוב (CPU) והוא "קופסה שקופה" – ניתן להסביר כל שלב בתהליך.
-
למידה עמוקה (DL): משתמשת ברשתות נוירונים (CNN) הלומדות תכונות באופן אוטומטי מתוך נתונים. היא דורשת מאגרי מידע עצומים וכוח עיבוד חזק (GPU), אך משיגה דיוק גבוה בהרבה (95%+) בסביבות מורכבות ומשתנות.
2. אילו ספריות קוד הן "חובת היכרות" למפתחים בתחום בשנת 2026?
הבחירה בספרייה תלויה בשפת התכנות ובמטרת הפרויקט:
-
Python (למחקר ופיתוח מהיר): * OpenCV: הבסיס לכל פעולת עיבוד תמונה.
-
PyTorch / TensorFlow: לאימון מודלים של למידה עמוקה.
-
MONAI: ספרייה ייעודית לעיבוד תמונה רפואית (Medical AI).
-
-
C++ (לביצועים בזמן אמת וקצה):
-
TensorRT: להאצת מודלים על חומרת NVIDIA.
-
PCL (Point Cloud Library): לעבודה עם חיישני ליידאר (LiDAR) ברכבים אוטונומיים.
-
3. כיצד באה לידי ביטוי הראייה הממוחשבת בעולם הרפואה והרכב האוטונומי?
אלו שני התחומים המובילים את היישומים המעשיים:
-
ברפואה: שימוש במודלים כמו U-Net לפילוח (Segmentation) אוטומטי של גידולים מתוך סריקות MRI או CT. המערכות עוזרות לרדיולוגים לקצר זמני אבחון ולהעלות את הדיוק (למשל, זיהוי דלקת ריאות ב-2 שניות).
-
ברכב אוטונומי: שימוש במודלים כמו YOLOv8 לזיהוי אובייקטים (הולכי רגל, תמרורים) בזמן אמת ב-60 FPS ומעלה, ושילוב של Occupancy Networks ליצירת מיפוי תלת-ממדי דינמי של סביבת הרכב.
4. מהם הטרנדים הטכנולוגיים המרכזיים שצפויים לשלוט בשנת 2026?
התחום נע לעבר אינטגרציה עמוקה יותר והסבריות:
-
Vision-Language Models (VLM): מודלים המאפשרים "לדבר" עם התמונה (למשל: "סמן את האזור החשוד ב-MRI").
-
Edge AI: העברת העיבוד מהענן לשבבים מקומיים (כמו Intel Loihi) כדי להוריד את השיהוי (Latency) ל-1 מילי-שנייה.
-
Explainable AI (XAI): כלים כמו Grad-CAM++ שמאפשרים להבין למידת המכונה קיבלה החלטה מסוימת, קריטי לאישור רגולטורי ברפואה ובתחבורה.
5. איך נראה מסלול למידה מומלץ למי שרוצה להיכנס לתחום באופן מקצועי?
המסלול אורך לרוב בין 9 ל-18 חודשים וכולל:
-
בסיס מתמטי ותכנותי: אלגברה ליניארית, סטטיסטיקה ושליטה ב-Python/C++.
-
קורסי ליבה: עיבוד תמונה דיגיטלי קלאסי (כמו קורסי הטכניון) והתמחות בלמידה עמוקה (Deep Learning Specialization).
-
פרויקטים מעשיים: בניית תיק עבודות הכולל פרויקטים כמו זיהוי גידולים (LUNA16) או מערכת מעקב אובייקטים (DeepSORT) על חומרת קצה.
ה